

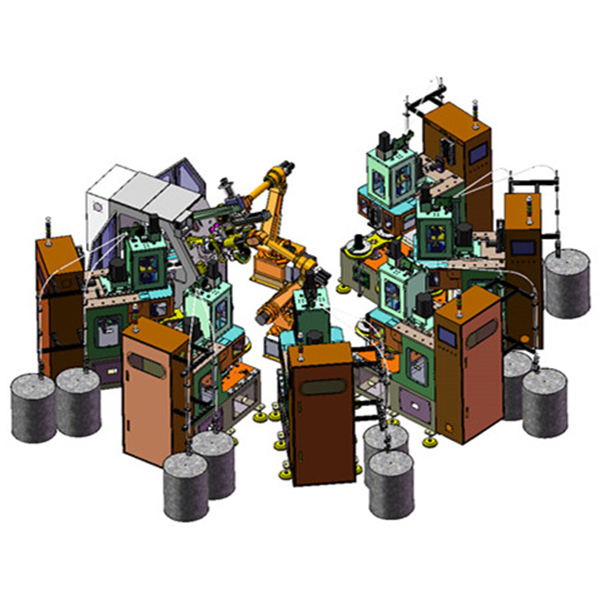
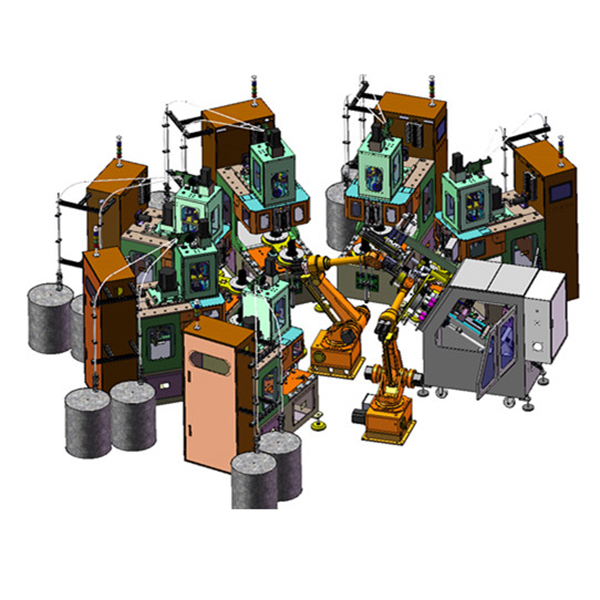
Շարժիչի ստատորի ավտոմատ արտադրական գիծ (ռոբոտի ռեժիմ 2)
Արտադրանքի նկարագրություն
● Ռոբոտը օգտագործվում է ուղղահայաց փաթաթող մեքենայի և սովորական սերվո լարերի ներդրման մեքենայի կծիկները տեղափոխելու համար։
● Խնայողություն լարերի փաթաթման և տեղադրման շահագործման աշխատանքի վրա։
Կառուցվածք
Ռոտորի ավտոմատ գծային հավաքումից հետո տարածված խնդիրների լուծումներ
Ռոտորի ավտոմատ գծային հավաքումը ավտոմատ սարքավորում է, որը բաղկացած է ակտուատորներից, սենսորային տարրերից և կառավարիչներից: Ռոտորի ավտոմատացված հավաքման գծի խափանումները կարող են հանգեցնել անկանոն կամ լիովին անգործունակ աշխատանքի: Այս հոդվածում մենք քննարկում ենք ռոտորի ավտոմատ հավաքման գծերի խափանումները հայտնաբերելու չորս տարածված մեթոդներ:
1. Կատարեք ռոտորի ավտոմատ գծի հավաքման մեջ էլեկտրամատակարարման, օդի աղբյուրի և հիդրավլիկ աղբյուրի սարքավորումների համապարփակ ստուգում: Ռոտորի ավտոմատ հավաքման գծի խնդիրների մեծ մասը առաջանում է էլեկտրամատակարարման, օդի աղբյուրի և հիդրավլիկ աղբյուրի խնդիրներից: Ստուգելիս համոզվեք, որ արհեստանոցի էլեկտրամատակարարումը բավարար է, և որ բոլոր սարքավորումները նորմալ են աշխատում: Ստուգեք հավաքման գծի հիդրավլիկայի համար անհրաժեշտ օդի ճնշման աղբյուրը և հիդրավլիկ պոմպը:
2. Ստուգեք, թե արդյոք սենսորի դիրքը ռոտորի ավտոմատ գծային հավաքման մեջ փոխվել է: Ժամանակի ընթացքում սենսորները կարող են զգայունության խնդիրներ ունենալ, անսարքություն կամ դիրքի փոփոխություն: Սենսորի հայտնաբերման դիրքը և զգայունությունը պետք է հաճախակի ստուգվեն, ճիշտ կարգավորվեն դիրքի փոփոխության դեպքում և անմիջապես փոխարինվեն, եթե այն խափանվի: Ռոտորի տեղափոխման գծային հավաքման գործողությունների ընթացքում թրթռման խնդիրները նույնպես կարող են առաջացնել սենսորների թուլացում: Կարևոր է հաստատել, որ սենսորը ամուր տեղադրված է իր տեղում:
3. Ստուգեք ռելեն, հոսքի կարգավորման փականը և ճնշման կարգավորման փականը: Ռելեի գործառույթը նման է մագնիսական ինդուկցիայի սենսորի գործառույթին, և երկարատև հողանցման խնդիրները կազդեն շղթայի բնականոն օգտագործման վրա և կպահանջեն փոխարինում: Հավաքման գծի պնևմատիկ կամ հիդրավլիկ համակարգը, գազի փականի բացումը, ճնշման փականի ճնշման կարգավորման զսպանակը և այլն կկորցնեն իրենց ամրությունը կամ կսահեն թրթռման խնդիրների պատճառով և կպահանջեն հաճախակի սպասարկում բնականոն օգտագործման ընթացքում:
4. Ստուգեք էլեկտրական, պնևմատիկ և հիդրավլիկ շղթաների միացումները: Եթե անսարքության տեղանքի ստուգումը չի բացահայտում խնդրի աղբյուրը, ստուգեք սարքի շղթայի վիճակը՝ բաց շղթայի առկայության համար: Համոզվեք, որ լարային ուղու հաղորդալարերը կոնտուրավորված չեն դուրս քաշվելու խնդիրների պատճառով և ստուգեք բրոնխները՝ վնասների կամ կնճռոտումների համար: Ստուգեք, թե արդյոք հիդրավլիկ յուղի շղթան խցանված է: Եթե շնչափողը խիստ կնճռոտված է, այն պետք է անմիջապես փոխարինվի: Եթե խնդիր կա հիդրավլիկ յուղի խողովակի հետ, այն նույնպես պետք է փոխարինվի:
5. Եթե վերը նշված պայմանները գոյություն չունեն, ռոտորի ավտոմատ գծային կարգավորիչում ծրագրային խնդիրների առաջացման հավանականությունը համեմատաբար ցածր է։
